
Görsel ve işitsel veriyi televizyon aracılığıyla paylaşabiliyoruz. Bir noktadaki dokunsal veriyi de benzer bir şekilde paylaşmamız mümkün bugünün tekonolojisi ile. Dokunsal veri iletişimi teknolojileri haptik teknoloji olarak adlandırılıyor.
Haptik, Yunanca “dokunulabilir birşey” anlamına gelen haptios kelimesinden türemiştir. Bir insanda 4 tip dokunsal sensör vardır. Parmak ucumuzda bu 4 sensör de mevcuttur.
· Nosiseptif: Acıyı hissetmemizi sağlar. İğne battığında bu reseptörler algılar.
· Termoreseptör: Isıyı hissetmemizi sağlar.
· Tactile: Etkileşime geçtiğimiz nesnenin titreşimini, dokusunu, yumuşaklığını/sertliğini algılamamızı sağlar.
· Kinestetik: Pozisyon, kuvvet, gerilim gibi mekanik özellikleri algılar.
Haptik Sistem Nedir?
Yukarıda saydığım 4 reseptörden herhangi birisi ile etkileşime geçmeyi hedefleyen sisteme haptik sistem denir. Yani insanın dokunma duyusuyla algılayabileceği bir çıktı üreten sistemdir.
En basit örneği cep telefonlarımızın titreşimidir. Telefonun sesini duyamayacağımız gürültülü bir ortamda, imdadımıza telefonların titreşim özelliği yetişir. Telefonlar titreyerek, tactile reseptörlerimizi tetikler, kaba bir tabirle bizi dürter. Bu iletişim sayesinde telenomuza mesaj geldiğini ya da birisinin bizi aradığını tespit ederiz.
Haptik sistemlerin en çok araştırma yapılan kısmı ise uzaktan robot etkileşimli sistemlerde dokunsal verinin iletilmesidir, özellikle kinestetik verinin. Örneğin bir kumanda ile robot kolunu yönetiyorsunuz. Robot kolu duvara değiyorsa sizin için kumandanız adeta bir duvar gibi davranmalı, böylece eliniz sert bir cisimle temas ediyormuş gibi hissetmeli. Böylece yönettiğiniz robotun çevresiyle olan etkileşimini elinizde hissedersiniz.
Aşağıdaki videoda, uzaktan yönetimle bir muzun kabuğu, robotun ucundaki neşter aracılığıyla soyuluyor. Robotu yöneten kişi, dokunsal verinin (kuvvet) iletimi sayesinde neşterin o an, muzun kabuğuyla mı yoksa muzun kendisiyle mi temas ettiğini elinde hissedebiliyor. Böylece soyma işlemini daha rahat yapabiliyor, bunu yaparken muzun kendisine zarar vermemeyi başarıyor.
Uygulama Alanları
1. Uzaktan Ameliyat (tele-robot, tele-operasyon)
Uzaktan ameliyat, tıp sektörünün geleceğinde çok önemli bi konuma sahip olacak. Burada hasta, doktor tarafından yönetilen bir robot aracılığıyla ameliyat ediliyor. Yukarıdaki muz kesme işlemine benzer bir mantıkla ama bu sefer muz değil, damar, doku kesme işlemleri gerçekleştiriliyor. Diğer uygulama alanlarını anlattıktan sonra uzaktan ameliyat uygulamalarına odaklanacağım. Şimdilik bu kadar.
2. Tıbbi Uygulamalar
Özellikle ameliyat simülasyonlarında haptik teknoloji çok rağbet görüyor. Elinde elektronik neşter tutan bir cerrah adayı, sanal gerçeklikte bir hastanın beynini açabiliyor. Bu sırada elektronik neşterde hastanın derisinin mekanik özelliklerini hissedebiliyor ve kendini gerçek ameliyat yapacağı günlere hazırlayabiliyor.
3. Askeri Uygulamalar
 Bomba imha robotu
Bomba imha robotu
Radyoaktif atıklar içeren veya patlama riski olan bölgelere müdahele etmekte kullanılan robotlarda da dokunsal veri oldukça faydalıdır. Örneğin bir bombayı etkisiz hale getirmeye çalışan, uzaktan kontrol edilen mobil bir robot düşünelim. Robotu bombayla etkileştirirken, hassas dokunuşlar yapmaya ihtiyaç duyabilirsiniz. Bunun için bombayla robot etkileşimindeki dokunsal verinin, operasyonu yürüten kişiye iletilmesi gerekmektedir.
4. Uzay Araştırmaları
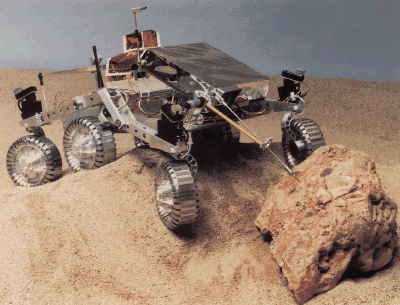
Uzay araştırmaları için tasarlanmış bir mobil robot, taş ile etkileşimde
Uzay araştırmaları şu ana kadar oldukça pahalı ve hiç bir maddi getirisi olmayan araştırmalar oldu. Bu işin büyük kısmını sırtlayan ABD hükümeti, zaman zaman NASA’ya verdiği desteği kısıyor, bazen dünyaya sesleniyor: “Bu yükü tamamen bize yüklemeyin”.
Özellikle Mars’a ilk gidildiğinde büyük bir ganimet toplamayı ummuştu NASA. Ancak şu ana kadar karşılaştıkları tek şey, kum ve taş…
Bilim adamı için bilgi paha biçilemezdir. Ancak onları finanse eden devlet veya özel sektörler için durum böyle değil. Bir araştırmayı desteklediklerinde, oradan katma değeri yüksek bir şeyler elde edilmesini umarlar. Uzay araştırmalarına devasa paralar yatırıldığı halde herhangi bir gelir elde edilebilmiş değil. Kısa ve orta vadede bir şey elde edileceğe de benzemiyor. Bu işi hizmet sektörüne çevirmeye çalışmalarında (uzay turizmi), bu ekonomik sıkıntılar yatıyordur, muhtemelen.
Araştırmaları ucuzlatmak için yöntemler arıyorlar. Bunun için düşündükleri bir yöntem de, Mars’a veya herhangi bir gezegene giden uzay araştırma robotlarının, taşları toplayıp Dünya’ya getirmesine gerek kalmamasıdır. Haptik sistemler aracılığıyla, biz taşlara Dünya’dan dokunalım ve onları analiz edelim.
5. Diğer Uygulama Alanları
Medya, e-ticaret, bilgisayar oyunları, sanat ve tasarım gibi alanlarda uygulamaları mevcut. Burada detaylara girmeyeceğim, sizlerin hayal gücüne bırakıyorum… Aşağıdaki grafikte haptik sistemlerin, zamanla farklı sektörlere nasıl yayıldığını görebilirsiniz.
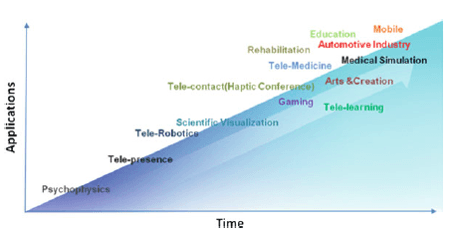
Haptik teknolojinin uygulama alanlarının genişlemesi zaman bağlı bir grafikte.
Uzaktan Operasyon Robotlarının Yapısı ve Faydaları
 Da Vinci Uzaktan Ameliyat Robotu
Da Vinci Uzaktan Ameliyat Robotu
Uzaktan operasyon robotlarında, operasyonu yapan robot (köle) ve operasyonu kontrol eden insanın köleyi yönetmesi için kullanılan kumanda (efendi) vardır. Genellikle kumanda, uzaktaki robotun bir benzeri veya bir küçültülmüş versiyonudur.
Uzaktan anlatılmak istenen kumanda ve robotun ayrı olmasıdır. Kumanda ve robot aynı odada olabileceği gibi farklı ülkelerde de olabilir.
Uzaktan operasyon robotları özellikle tıbbi alandaki önemi gün be gün artmaktadır. Faydalarını sıralamadan önce bir örnek vermek istiyorum. Bir hastanın boğazından bir kitle alınması gerektiğini varsayalım. Klasik yöntemde, hastanın boynu açılır. Operasyon yapılır ve boyun tekrar dikiş atılarak kapatılır. Komplikasyonu yüksek bir ameliyattır. Bu operasyon, uzaktan yönetilen bir robot aracılığı ile yapılırsa, hastanın ağzından boğazına girebilecek incelikte bir robot kolu vasıtasıyla, hastanın hiç bir yerini açmadan operasyon gerçekleştirilir. Hastaya daha az zarar verilmiş olur, iyileşme süresi hızlanır.
Uzaktan operasyon robotlarının faydaları:
· Ergonomi: Cerrahın rahat bir ortamda ameliyatı gerçekleştirmesi. Eldiven veya özel kıyafetler giymeden, bir odada, bir koltuğun üzerinde ameliyatı gerçekleştirebilir.
· Manipülasyon: İnsan elinin hassasiyeti bellidir. Mikron seviyede hareketler yapması mümkün değildir. Ancak siz kumanda ve robot arasında bir ölçeklendirme yapabiliriz. Örneğin kumandanın 1 metre oynaması, robotta 1 santimetre oynamaya sebep olabilir. Böylece doktorun el kabiliyetini arttırmış oluruz.
· Maharet: İnsan elinin yapamayacağı hareketleri robota yaptırabiliriz. Örneğin elimiz bir yönde 3 tur atamazken, robot bu hareketi sınırsız sayıda yapabilir.
· Haptik: Manipülasyonda yaptığımız ölçeklendirmeyi, kuvvet geribeslemesinde de yapabiliriz. Böylece doktora, neşterin dokuya mı damara mı temas ettiğini daha rahat ayırt edebilir.
Tele-operasyonda Haptik Sistemin Faydaları
Her uzaktan operasyon robotu haptik sistem içermez. Çünkü, robotik sistemlere dokunma verisi eklemek oldukça pahalı bir teknoloji.

Nesneleri delikten geçirme deneyi
Yapılan araştırmalara göre, uzaktan operasyon robotlarında dokunsal verinin varlığı, kumandayı yöneten kişinin performasını ciddi anlamda arttırıyor. Araştırmada, deliklerden nesne geçirme deneyi gerçekleştirilmiştir (peg in a hole). Bu deneyde farklı geometrideki nesneler, farklı geometrideki uygun deliklerden geçirilmeye çalışılıyor. Araştırmanın sonuçlarına göre kuvvet geri beslemesi ile yapılan operasyonda
· Temas kuvvetinin ortalamasında %30 azalma
· Operasyon süresinde %30 azalma
· Hata oranında %60 azalma
gözlemlenmiştir. Temas kuvvetinin düşmesi demek, operasyon süresince, hem robota hem robotun etkileştiği nesnelere daha az zarar verildiğini ifade ediyor.
Madem Bu Kadar Faydalı, Araştırılan Şey Nedir?
Öncelikle uzaktan operasyon robotlarında haptik sistemlerin entegre olması için çeşitli sensörler gerekiyor. Örneğin köle robotun etrafıyla dokunsal etkileşimini algılamak için kuvvet sensörü. Bu kuvvet sensörleri oldukça pahalı. 6 farklı eksende ölçüm yapan bir kuvvet sensörünün piyasa fiyatı 15.000$ civarında. Robotun kendi maliyeti kadar.
Yapılan araştırmalar bir kaç farklı noktaya dayanıyor.
· Kuvvet sensörü olmadan haptik sistemler: Sadece hız ve konum bilgisinden kuvvetlerin tahmin edilmesi işlemi ile yapılıyor. Newton yasaları sayesinde kuvvet ve hız arasındaki ilişkiyi bildiğimiz için, ölçmesi ucuz olan hız bilgisi ile kuvvetleri tahmin edebiliriz. Kuvvet sensörlü etkileşim kadar hassas olamıyor. Daha hassas hale getirilmeye çalışılıyor.
· Kuvvet sensörünün daha ucuza mâl edilmesi.
· Robot ve kumanda farklı ülkelerdeyse, performansın sağlanması: Robot ve kumanda fiziksel olarak birbirinden uzaklaştıkça işin içine zaman gecikmeleri giriyor. İnternet hızı, iletilen verinin sağlıklı olması gibi konular işin içine giriyor. Bir yandan bu zaman gecikmeleri dokunsal iletişimin doğruluğunu büyük ölçüde etkiliyor. Bu etkileri azaltmanın yöntemleri araştırılıyor.
OCAK MEDYA Ahmet Taha KORU 28.11.2016


